1.步行周期 步行周期是指行走时从一侧的足跟触地至同侧足跟再次触地所经历的过程,每一侧下肢都有各自的步行周期。 步行周期可分为6个时期:触地期、站立中期、推进期、摆动初期、摆动中期、摆动末期,也可以分为2个时相:支撑相(触地期、站立中期、推进期)和摆动相(摆动初期、摆动中期、摆动末期)。 步行周期示意图如下图所示:图 步行周期示意图 软件数据如下所示:
表 步行周期各时期比例
表 步态时相参数
表 步态时相参数 参数定义如下: 触地期(contact):观察肢的足跟首次触地到观察肢的整个足底触地为止。
图 触地期示意图 站立中期(mid stance):观察肢的整个足底触地到观察肢的足跟离地为止。
图 站立中期示意图 推进期( advance):观察肢的足跟离地到观察肢的足尖离地为止。
图 推进期示意图 摆动初期(initial swing):观察肢的足尖离地(此时整个脚脱离地面)到观察肢的膝关节屈曲到最大限度为止。
图 摆动初期示意图 摆动中期(mid swing):观察肢的膝关节屈曲到最大限度到观察肢的小腿和地面垂直为止。
图 摆动中期示意图 摆动末期(terminal swing):观察肢的小腿和地面垂直到观察肢的足跟下一次触地为止。
图 摆动末期示意图 2.常规步态参数 常规步态参数可以输出:步宽、步长、步速、步频、触地角度、离地角度、触地冲击力、步行周期。 软件数据如下所示:
表 常规步态参数 参数定义如下: 步宽(stride width):行走时左、右两足之间的横向距离,通常以足跟中心为测量参考点,以米为单位。步宽有助于评估行走稳定性,辅助步态异常的诊断。
图 步宽示意图 跨步长(stride length):又叫步幅,指同一侧足跟前后连续两次着地点间的纵向直线距离,以米为单位。正常人步行时左右步长基本对称。
图 跨步长示意图 步速(pace):单位时间行走的距离,通常以米/秒为单位。
图 步长 步频(cadence):单位时间内行走的步数,通常以步数/秒为单位。
图 步频示意图 触地角度(contact angle):足跟触地瞬间,足底平面与地面之间的夹角。反映了脚在行走时与地面接触的姿势,通常以度数表示。
图 触地角度示意图 离地角度(toe off angle):足尖离地时,足底平面与地面之间的夹角。反映了脚在行走时离开地面的姿势,常以度数表示。
图 离地角度示意图
图 触地离地角度 触地冲击力(Ground reaction force):足触地时产生的地面反作用力,以重力加速度g为单位。垂直于地面的力,作用于脚部,以支撑身体重量和推动身体向前。
、 图 触地冲击力示意图 步行周期(gait cycle):从一侧的足跟触地至同侧足跟再次触地时所用的时间,以秒为单位。 3.变异对称性 步态对称性:左足摆动时间和右足摆动时间之比。 步态变异性:左足速度和右足速度之比。
图 变异对称性
作者:FOHEART
1.3.8之前版本的软件录制的数据如何使用1.3.8以后的软件重新解算
1.3.8之前版本的软件录制的数据如何使用1.3.8以后的软件重新解算
FOHEART
MotionVenus 1.3.8以后的软件版本(包含1.3.8)可以对以前软件版本录制的.raw文件进行重新解算,获得全新的输出效果。
软件升级后,上一版本录制的动捕文件不会自动应用的算法,这是需要我们手动更新。
(1) 首先关闭需要重新解算的动捕文件,删除与文件名相同的、后缀名为.TRE的文件(在删除.TRE文件之前务必对其做好备份)。
(2) 重新打开动捕文件,新版软件会对其进行重新解算。
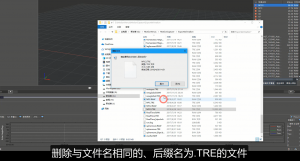
请参见视频中的步骤进行操作:
孚心科技(FOHEART)推出具有高低动态性能的IMU/AHRS模组MP1
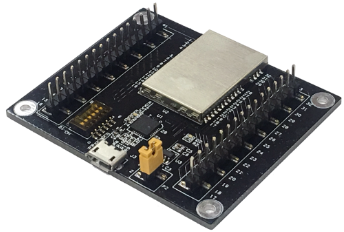
近日,北京孚心科技有限公司推出了消费级IMU/AHRS模组FOHEART·MotionPro-1(简称:MP1)。孚心科技(FOHEART)一直致力于惯性动作捕捉系统的研发,在IMU/AHRS方面有极深的技术积累。
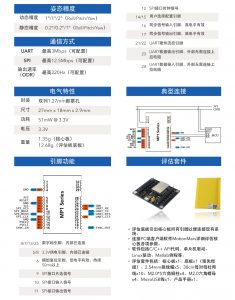
MP1使用业界先进的MEMS六轴加速度/角速度传感器及三轴磁力计,模组内置的EKF融合算法,能够输出最大220Hz的姿态数据。模组可以持续追踪高动态运动而不产生累积误差;同时也能在低动态/静止条件下保持0.2°/0.2°/1°(Roll/Pitch/Yaw)的输出精度。
MP1的应用场景主要在体育运动数据采集分析、行人导航、VR/AR 6DOF姿态跟踪、手持式交互娱乐设备、倾角测量、倾角开关、无人车自主导航、平衡车平稳控制、无人机平稳/姿态控制、使用C/C++API进行数据采集研究等方面。

MP1的评估套件的评估底板引出所有引脚以便连接现有系统,连接PC客户端软件FOHEART·MotionMars详细评估各项核心参数,MotionMars软件包括C/C++API代码,单片机驱动、Linux驱动、Matlab例程等。
孚心科技CTO胡茂晓表示:“MP1主打性价比及适合高低动态场景的使用。同时孚心科技在其下一代惯性动作捕捉系统上也采用了MP1的某些算法技术。在客户的要求下,我们可以提供模组尺寸的定制服务。”
使用游戏引擎控制 MotionVenus动作校准
一、Unity3D平台
在MotionVenus1.3.6及以上版本,可以在游戏引擎中使用脚本实现反向控制MotionVenus。
主要功能:
基本动作校准。
上肢动作校准。
MotionVenus可运行在后台,但不可最小化。
1.1功能说明
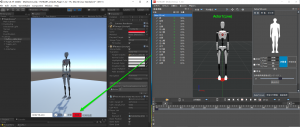
本功能适合在将Unity3D场景打包编译后,最大化运行时,直接使用脚本控制人物进行校准动作。无需切换MotionVenus至前台进行操作。
1.2配置步骤
1.2.1软件准备
MotionVenus(链接)1.3.6及以上版本。
FOHEART_Unity3D_Plugin(链接)1.3.6及以上版本分支。
1.2.2Unity端配置
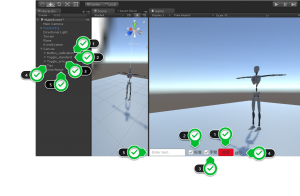
Button_calibration
点击以开始校准。
Toggle_standard
选中为进行Z_Pose和I_Pose校准。
Toggle_arm
选中为进行T_Pose和S_Pose校准。
Tips
校准过程中的提示。
ActorName
校准的人物名称,如果场景中有多个人物,请填写需要校准的人物的名称。注意此名称需要与MotionVenus中的人物名称相同,例如Actor1(Live)。
变化:Unity端数据接收脚本现在被挂载到了Button_calibration按钮下:

其中,UDP_Target_IP是运行MotionVenus软件的PC端IP地址,这里我们是在同一台PC运行,所以填写127.0.0.1。UDP_Target_Port是运行MotionVenus软件的PC端端口号。注意此端口号应与MotionVenus中的设置->选项->插件->命令接收中的端口号填写一致:
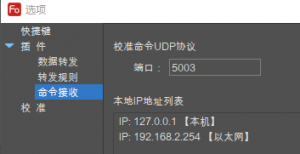
1.2.2MotionVenus端配置
MotionVenus端需要确认设置->选项->插件->命令接收中的端口号与Unity3D中的NetFrameDataReceiver中的UDP_Target_Port相同。
1.3开始运行
填入需要校准的Actor名称,例如Actor1(Live)。
点击校准。
完成。
二、Q&A
单个Sensor的校准是否也可以在游戏引擎中进行?
不可以。现阶段只支持人体级别的初始动作校准。
MotionVenus是否可以不运行?
不可以。MotionVenus需要运行以解算人体动作。
为什么点击校准后MotionVenus端无反应?
请检查Unity端人物名称是否填写正确。检查Unity端UDP_Target_IP与UDP_Target_Port是否填写正确。
附件:PDF文档如下
视频演示如下:
关于孚心科技软件FOHEART MotionVenusV1.3.0
一、功能部分
1、增加了离线数据的网络发送,最多支持五组,可在Unity3D、UE4中播放多人离线数据流。
2、修改网络数据发送为后台自动转发。
3、增加了RAW文件的详情页,可查看文件内部信息。
4、增加了绘图区欧拉角旋转顺序设置,支持所有六种旋转顺序。
5、增加了多语言切换,现已支持英文。
6、增加了交互性帮助功能,单击每个组件右上角的问号按钮,可获得与本组件相关的网络帮助文档。
7、增加了节点校准视频。
8、其它细节bug修正。
二、校准管理

1. 当穿戴完成动作捕捉设备,便可以开始人体校准 精准校正共有四种校正方式,分别为:“Z_Pose”、“I_Pose”、“T_Pose”、“S_Pose”。 如果你想精确校准,可以勾选“手臂”前面的选择框。点击“开始校准”你可以观看上面的人物图片,做出与之相对应的动作,每一种校准动作的系统默认时间为3秒钟,可以点击软件菜单栏里面的“设置”、“选项”自定义校准间隔时间。
2. N-Pose
3. I-Pose
4. T-Pose 胳膊向身体两侧平举,确保胳膊为伸直状态。
5. S-Pose 胳膊向身体前方平举,确保胳膊为伸直状态。
惯性动作捕捉系统研发之路
谈到惯性动作捕捉系统不得不提的一家公司就是Xsens,可以说Xsens是惯性动捕的开山鼻祖。这家公司位于荷兰的一个小镇上。从2000年开始做IMU、AHRS,这是什么东西,这就是惯性动捕的基本传感器,不得不承认对方在此方面有很深的技术积累。
大约是4年前,当我第一次看到Xsens的产品演示效果,直觉判断惯性技术已经是发挥到了极致。我们开始细致的研究惯性动捕的技术细节,发现里面的技术门槛很高,这里面有几个原因:第一就是惯性动捕并不是一个学科,国内作为学术研究的几乎没有,而且我们发现国内关于惯性动捕的论文实在不忍直视;第二个原因就是惯性动捕是由多个技术点组成的,里面涉及到了惯性技术、通信技术、人体运动学、软件的兼容性等问题。
大家可能觉得惯性技术国内在这方面很是成熟,其实不然,惯性技术应用的最多的地方主要是武器上,惯性导航用的主要是机械式、激光式等惯性方式。但是对动捕系统来讲则是MENS形式,通俗易懂的讲就是加速度计、磁力计、陀螺仪全都是芯片形式,难点就在这里,我们从最初的芯片选型时几乎市面上所有的九轴芯片尝试了一个遍,因为当时市面上还没有国产的动捕,不知道用什么芯片最好,只能一个个去尝试,最后发现,市面几乎很那有适用于动捕的芯片,精度高的芯片量程低、精度高的芯片有的体积比较大、功耗还很大。当我们确定住最终的芯片时,才发现芯片自带的算法程序很难满足动捕的技术需求,怎么办,最终做的决定就是不用芯片自带的算法程序,自己写,当时谁都没有底气,自己写的算法还能胜过厂家的算法程序,厂商的芯片都是拿钱堆出来的,研发这条路就是这样,留不得你有任何投机取巧的行为,当时坚守住这一点:完全自己写。如果惯性动捕你只是想做一个Demo演示用的话,完全不必要自己去攻克传感器底层的算法的难关。底层的惯性技术到底难在什么地方,那就是没有一种统一的数学模型来解决这个问题,最怕的就是这个地方,如果有一个数学模型那就好了看懂了就会用,最终自己构建一个数学模型,模型是否最优这是无解的,只能是目前最优。

通信问题始终是一个不可逾越的问题,当你做一个产品时,你想到的不是只要跑通数据就可以,而是最佳性能,你的通信功耗、通信质量、通信距离、多点通信、同步性这些都是你需要考虑的。
最后一个大难题就是你的PC客户端软件,如果你直接想把硬件接入Unity就可不用理会这个地方。最后的最后大家都才意识到,这才是最核心的地方。怎么去做,大家都没研究过里面的算法。大家耳熟能详的就是IK(反向动力学)、FK(正向动力学),怎们写、怎么改进、怎么用、用在什么地方、何时用、到底用了还是没用,这些都是难题,每一个小小技术细节都是一个巨大的问题挑战。其实IK、FK算法还不算什么,在人体姿态上你还要加上更多的算法,惯性技术捕捉下来的就是一个骨骼的姿态角,没有任何物理意义,靠更多的算法去提升精度,人体每做出的一个姿势动作都需要你用相应的算法去解决。时下最热的的深度学习你也要考虑不会会应用到惯性动捕人体姿态的解算上。


当我们看动作捕捉技术发展史的时候你就会发现精度最高的动捕并不是光学动作捕捉,而是机械式动捕,机械式动捕和光学动捕都已是上个世纪的产物,机械式动捕早已经被淘汰。目前来看光学动捕的精度很高,但大家不容易注意到的一个趋势就是消费级惯性动捕所用的芯片精度越来越高,这就意味着未来惯性动捕的精度越来越高。大家对惯性动捕印象不好的地方可能就是第一:磁干扰,其实现在的算法以及芯片已逐步的克服了这一点,再其次就是累计误差,关于误差谈点专业的,目前的消费级芯片的陀螺仪输出量误差能控制在1度以内,再加上磁力计的纠偏,误差在几个小时内几乎已经不存在了。
我们认知一个产品看的一定是他的未来,而不是目前的产品状态,这就是我们的创新精神。怎样判断一个产品,第一一定是你赋予了她足够的生命力,他的用户体验,他的未来是你首先考量的。惯性动捕不是一个转瞬即逝的产品,目前还没有看到新的技术能取代掉惯性动捕,也就是说他的生命周期还有很久,能赢得这场战役的一定是全部自主研发的,一个系统如果是拼凑出来的最后一定会付出代价的。
产品的生命全部来自于背后的技术。

惯性动作捕捉设备的发展和原理初步介绍2023
随着人机交互技术的不断发展,人与计算机的自然的、多模态的交互技术已经进入白热化的阶段,而动作捕捉技术作为人机交互的一个重要分支,近几年,发展迅速。动作捕捉系统就是通过对人体或其他物体运动姿态和位置的检测和记录,将这些信息转换成数字化的抽象模型,表达不同时刻目标所处的姿态。运动捕捉系统已广泛应用在运动分析、模型编码、虚拟现实、动画制作、智能监控系统、游戏制作等领域。比如,在互动式游戏中,使游戏者的各种动作能够驱动游戏环境中虚拟角色的动作,为游戏者带来一种全新的参与体验,同时加强了游戏的真实感和互动性;在动画制作上,运动捕捉技术极大地提高动画和游戏制作的开发效率和开发水平,并降低其开发成本。在体育训练上,运动捕捉技术可以捕捉运动员在运动过程中的位移、速度、加速度、力以及肌电信号等量化信息,结合机器学习技术和人体生物力学原理,可以从量化角度去分析运动员的动作并提出科学的改进方法。因此应用于人体的动作捕捉技术具有广阔的应用前景和巨大的商用价值。
运动捕捉从工作原理上,主要分为微传感器MEMS式、电磁式、光学式、机械电动式和声学式等。传统的光学式由多个摄像机和标志点或发光点组成。摄像机己知坐标,标志点被贴附在捕捉对象身体的关键部位,通过比较和分析摄像机捕捉得到的图像数据计算标志点的空间位置。随着计算机视觉技术的发展,完全可以应用图像识别、分析技术,由视觉系统直接识别表演者身体关键部位并测量其运动轨迹。现在主流的动捕设备是光学式和微传感器MEMS式。光学式的动作捕捉系统是目前对使用者限制最小的运动捕捉方法,其捕捉的范围大,使用方便,速度快,数据延迟小,能做到实时捕捉。但是系统后处理包括的识别、跟踪、空间坐标的计算工作量较大,而且设备昂贵,对光学条件要求苛刻,并且对于遮挡状态捕捉效果差。微传感器MEMS式动捕设备可以克服光线明暗影响的不足,设备的成本低,精度较高,有利于实时测量,也可以支持多个对象的同时捕捉。下面,我们主要介绍一下基于微传感器的惯性动作捕捉技术。
基于微传感器的惯性动作捕捉设备的测量装置,主要由几个测量节点组成,每个测量节点都有九轴的惯性测量单元,会返回在运动过程中的角速度、加速度和磁力计的测量信息。陀螺仪可以测量节点相对于本体坐标系的三轴转动角速率,在己知初始状态的条件下,可以得到刚体目前的姿态。但是目前大部分系统使用的陀螺仪传感器为芯片,有零偏误差,长时间积分会导致完全偏离失准。而应用加速度和地磁传感器,进行角度计算的方法会受到高频噪声的影响,例如由于线性运动而导致的对重力加速度的测量误差。我们利用Kalman Filter技术,对多传感器数据进行融合,利用零速度检测进行滤波矫正。卡尔曼滤波器是目前研究用得最多的姿态滤波算法。卡尔曼滤波器的广泛使用,是由于它有成熟的理论支持和有效性。