一、Unity3D平台
在MotionVenus1.3.6及以上版本,可以在游戏引擎中使用脚本实现反向控制MotionVenus。
主要功能:
基本动作校准。
上肢动作校准。
MotionVenus可运行在后台,但不可最小化。
1.1功能说明
本功能适合在将Unity3D场景打包编译后,最大化运行时,直接使用脚本控制人物进行校准动作。无需切换MotionVenus至前台进行操作。
1.2配置步骤
1.2.1软件准备
MotionVenus(链接)1.3.6及以上版本。
FOHEART_Unity3D_Plugin(链接)1.3.6及以上版本分支。
1.2.2Unity端配置
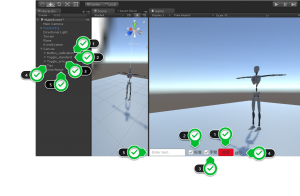
Button_calibration
点击以开始校准。
Toggle_standard
选中为进行Z_Pose和I_Pose校准。
Toggle_arm
选中为进行T_Pose和S_Pose校准。
Tips
校准过程中的提示。
ActorName
校准的人物名称,如果场景中有多个人物,请填写需要校准的人物的名称。注意此名称需要与MotionVenus中的人物名称相同,例如Actor1(Live)。
变化:Unity端数据接收脚本现在被挂载到了Button_calibration按钮下:

其中,UDP_Target_IP是运行MotionVenus软件的PC端IP地址,这里我们是在同一台PC运行,所以填写127.0.0.1。UDP_Target_Port是运行MotionVenus软件的PC端端口号。注意此端口号应与MotionVenus中的设置->选项->插件->命令接收中的端口号填写一致:
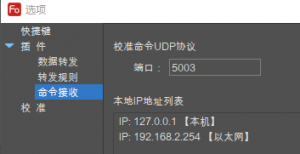
1.2.2MotionVenus端配置
MotionVenus端需要确认设置->选项->插件->命令接收中的端口号与Unity3D中的NetFrameDataReceiver中的UDP_Target_Port相同。
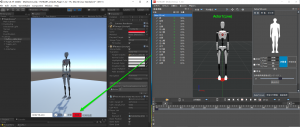
1.3开始运行
填入需要校准的Actor名称,例如Actor1(Live)。
点击校准。
完成。
二、Q&A
单个Sensor的校准是否也可以在游戏引擎中进行?
不可以。现阶段只支持人体级别的初始动作校准。
MotionVenus是否可以不运行?
不可以。MotionVenus需要运行以解算人体动作。
为什么点击校准后MotionVenus端无反应?
请检查Unity端人物名称是否填写正确。检查Unity端UDP_Target_IP与UDP_Target_Port是否填写正确。
附件:PDF文档如下
http://softwares.foheart.com/AN3363%EF%BC%9A%E4%BD%BF%E7%94%A8%E6%B8%B8%E6%88%8F%E5%BC%95%E6%93%8E%E6%8E%A7%E5%88%B6%E4%BA%BA%E7%89%A9%E6%A0%A1%E5%87%86rev1.pdf
视频演示如下: